
Chuyên đề Tin học 10 trang 55 Kết nối tri thức
Với lời giải Chuyên đề Tin 10 trang 55 trong Bài 12 Thực hành: Điều khiển robot trên sa bàn Chuyên đề học tập Tin học 10 Kết nối tri thức hay nhất, ngắn gọn sẽ giúp học sinh dễ dàng trả lời các câu hỏi & làm bài tập Chuyên đề Tin học 10 trang 55.
Chuyên đề Tin học 10 trang 55 Kết nối tri thức
Nhiệm vụ 1 trang 55 Chuyên đề Tin học 10: Yêu cầu: Lập chương trình điều khiển robot đi một vòng quang sa bàn theo chiều ngược kim đồng hồ, xuất phát từ vị trí Bắt đầu và dừng tại vị trí Kết thúc.
Lời giải:
Chuẩn bị: Sa bàn, robot có gắn thành phần động cơ, cảm biến dò đường.
Thực hiện: Trong thực tế, khi được cấp cùng một nguồn hoạt động thì các động cơ DC vẫn không xoay với tốc độ bằng nhau do giữa chúng tồn tại chênh lệch về tốc độ xoay. Do vậy, em có thể điều chỉnh tốc độ của từng động cơ với các mức chênh lệch tốc độ khác nhau, ví dụ, giữ nguyên tốc độ một động cơ và tăng hoặc giảm tốc độ động cơ còn lại, sau đó chạy thử để kiểm tra kết quả và điều chỉnh cho chính xác.
(Thực hiện trên phần mềm GaraBlock)
Bước 1. Lập trình cho bốn trường hợp của cảm biến dò đường.
- Trường hợp 1: Khi cả hai mắt tín hiệu cảm biến dò đường cùng nằm trên đường màu đen, em cần lập trình cho robot đi thẳng với tốc độ phù hợp (Hình 12.2)

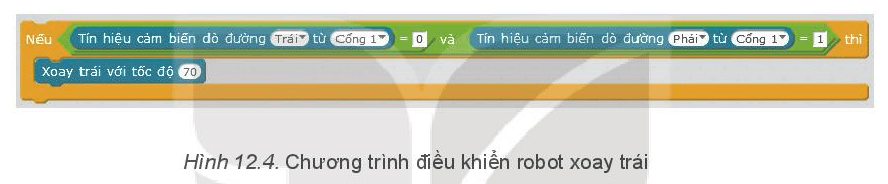
- Trường hợp 2: Khi cảm biến dò đường bị lệch phải, em cần lập trình cho robot xoay trái với tốc độ phù hợp (Hình 12.4)
- Trường hợp 3. Khi cảm biến dò đường bị lệch trái, em cần lập trình cho robot xoay phải với tốc độ phù hợp (Hình 12.5)

- Trường hợp 4. Khi hai mắt tín hiệu cảm biến dò đường cùng nằm trên đường màu trắng, cần lập trình cho robot dừng lại. Ví dụ chương trình trong Hình 12.6

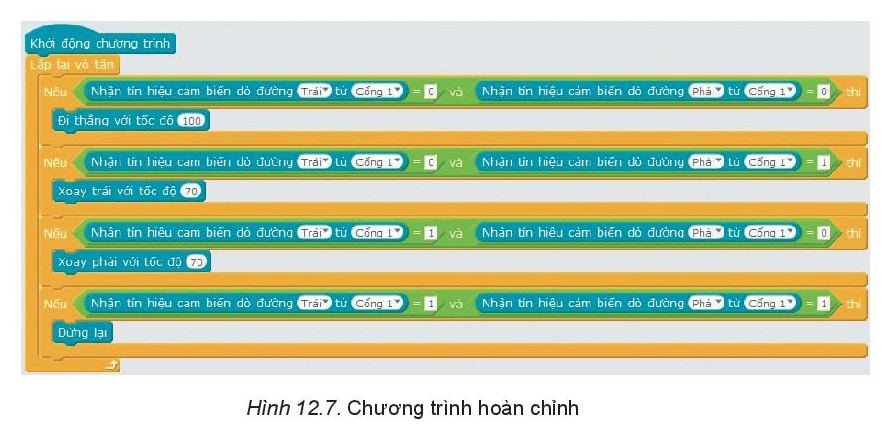
Kết hợp cả 4 trường hợp trên, em sẽ lập được chương trình điều khiển robot sử dụng cảm biến dò đường thực hiện nhiệm vụ 1. Chương trình như Hình 12.7
- Bước 2: Kết nối với robot máy tính và tiến hành nạp chương trình đã lập vào robot.
- Bước 3: Sau khi nạp chương trình thành công, đặt robot vào vị trí bắt đầu trên sa bàn sao cho cả hai mắt của cảm biến dò đường đều nằm trên đường màu đen. Sau đó bấm nút chuyển đến chế độ lập trình với máy tính (vòng LED màu trắng) trên mạch điều khiển của robot và quan sát kết quả, robot sẽ di chuyển từ vị Bắt đầu và tự động dừng lại ở vị trí Kết thúc.
Lời giải Chuyên đề Tin 10 Bài 12 Thực hành: Điều khiển robot trên sa bàn hay khác:
Xem thêm lời giải bài tập Chuyên đề học tập Tin học 10 Kết nối tri thức hay, chi tiết khác:
Chuyên đề Tin học 10 Bài 13: Lập trình điều khiển một số phu kiện
Chuyên đề Tin học 10 Bài 14: Thực hành: Dự án điều khiển robot trên sa bàn
Chuyên đề Tin học 10 Bài 1: Cấu tạo chung của robot giáo dục
Chuyên đề Tin học 10 Bài 2: Bảng mạch điều khiển và cơ cấu chấp hành
Chuyên đề Tin học 10 Bài 3: Cảm biến và phụ kiện dùng trong robot
Xem thêm các tài liệu học tốt lớp 10 hay khác:
- Giải Chuyên đề học tập Tin học 10 Kết nối tri thức
- Giải Chuyên đề học tập Tin học 10 Chân trời sáng tạo
- Giải Chuyên đề học tập Tin học 10 Cánh diều
- Giải lớp 10 Kết nối tri thức (các môn học)
- Giải lớp 10 Chân trời sáng tạo (các môn học)
- Giải lớp 10 Cánh diều (các môn học)
TÀI LIỆU CLC DÀNH CHO GIÁO VIÊN VÀ PHỤ HUYNH LỚP 10
+ Bộ giáo án, bài giảng powerpoint, đề thi file word có đáp án 2025 tại https://tailieugiaovien.com.vn/
+ Hỗ trợ zalo: VietJack Official
+ Tổng đài hỗ trợ đăng ký : 084 283 45 85
Đã có app VietJack trên điện thoại, giải bài tập SGK, SBT Soạn văn, Văn mẫu, Thi online, Bài giảng....miễn phí. Tải ngay ứng dụng trên Android và iOS.


Nếu thấy hay, hãy động viên và chia sẻ nhé! Các bình luận không phù hợp với nội quy bình luận trang web sẽ bị cấm bình luận vĩnh viễn.
- Giải Tiếng Anh 10 Global Success
- Giải Tiếng Anh 10 Friends Global
- Giải sgk Tiếng Anh 10 iLearn Smart World
- Giải sgk Tiếng Anh 10 Explore New Worlds
- Lớp 10 - Kết nối tri thức
- Soạn văn 10 (hay nhất) - KNTT
- Soạn văn 10 (ngắn nhất) - KNTT
- Soạn văn 10 (siêu ngắn) - KNTT
- Giải sgk Toán 10 - KNTT
- Giải sgk Vật lí 10 - KNTT
- Giải sgk Hóa học 10 - KNTT
- Giải sgk Sinh học 10 - KNTT
- Giải sgk Địa lí 10 - KNTT
- Giải sgk Lịch sử 10 - KNTT
- Giải sgk Kinh tế và Pháp luật 10 - KNTT
- Giải sgk Tin học 10 - KNTT
- Giải sgk Công nghệ 10 - KNTT
- Giải sgk Hoạt động trải nghiệm 10 - KNTT
- Giải sgk Giáo dục quốc phòng 10 - KNTT
- Lớp 10 - Chân trời sáng tạo
- Soạn văn 10 (hay nhất) - CTST
- Soạn văn 10 (ngắn nhất) - CTST
- Soạn văn 10 (siêu ngắn) - CTST
- Giải Toán 10 - CTST
- Giải sgk Vật lí 10 - CTST
- Giải sgk Hóa học 10 - CTST
- Giải sgk Sinh học 10 - CTST
- Giải sgk Địa lí 10 - CTST
- Giải sgk Lịch sử 10 - CTST
- Giải sgk Kinh tế và Pháp luật 10 - CTST
- Giải sgk Hoạt động trải nghiệm 10 - CTST
- Lớp 10 - Cánh diều
- Soạn văn 10 (hay nhất) - Cánh diều
- Soạn văn 10 (ngắn nhất) - Cánh diều
- Soạn văn 10 (siêu ngắn) - Cánh diều
- Giải sgk Toán 10 - Cánh diều
- Giải sgk Vật lí 10 - Cánh diều
- Giải sgk Hóa học 10 - Cánh diều
- Giải sgk Sinh học 10 - Cánh diều
- Giải sgk Địa lí 10 - Cánh diều
- Giải sgk Lịch sử 10 - Cánh diều
- Giải sgk Kinh tế và Pháp luật 10 - Cánh diều
- Giải sgk Tin học 10 - Cánh diều
- Giải sgk Công nghệ 10 - Cánh diều
- Giải sgk Hoạt động trải nghiệm 10 - Cánh diều
- Giải sgk Giáo dục quốc phòng 10 - Cánh diều


 Giải bài tập SGK & SBT
Giải bài tập SGK & SBT
 Tài liệu giáo viên
Tài liệu giáo viên
 Sách
Sách
 Khóa học
Khóa học
 Thi online
Thi online
 Hỏi đáp
Hỏi đáp